本文最后更新于2383天前,其中的信息可能已经有所发展或是发生改变。
源码
const int TrigPin = 3;
const int EchoPin = 4;
// 定义变色灯LED的三个输出接口,这里也可以选用三个led
int ledpin1 = 5; // R
int ledpin2 = 6; // G
int ledpin3 = 7; // B
int beeppin = 8; // 蜂鸣器的pin
int i = 0;
void setup ()
{
Serial.begin(9600); //测量结果将通过此串口输出至 PC 上的串口监视器
pinMode(EchoPin, INPUT); //设置EchoPin 为输入模式
pinMode(TrigPin, OUTPUT); //设置超声波数字IO脚模式,OUTPUT为输出
pinMode(ledpin1,OUTPUT);
pinMode(ledpin2,OUTPUT);
pinMode(ledpin3,OUTPUT);
pinMode(beeppin,OUTPUT); //设置蜂鸣器引脚输出模式
}
void loop()
{
digitalWrite(TrigPin, LOW); // 通过Trig/Pin 发送脉冲,触发 HC-SR04 测距,使发出发出超声波信号接口低电平2μs
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH); // 使发出发出超声波信号接口高电平10μs,这里是至少10μs
delayMicroseconds(10);
digitalWrite(TrigPin, LOW); // 保持发出超声波信号接口低电平
int distance = pulseIn(EchoPin, HIGH); // 读出脉冲时间
distance= distance/58; // 将脉冲时间转化为距离(单位:厘米)
Serial.println(distance); //输出距离值
if(distance<20) //当距离<20cm(这个数据可以在超声波测量的范围内随意改,3cm~450cm )
{
setColor(255, 0, 0);//三色LED的设置颜色,如果是用三个led则这里删去
buzzer1();
}
else if (distance<=120) //当距离<120cm(这个数据可以在超声波测量的范围内随意改,3cm~450cm )
{
setColor(0, 0, 255);
buzzer2();
}
else
{
setColor(0, 255, 0);
buzzer3();
}
}
//*****************************************************************
void buzzer1()
{
tone(beeppin,900);
delay(300); //响声间隔300ms 听上去更急促
noTone(beeppin);
}
void buzzer2()
{
tone(beeppin,600);
delay(500); //响声间隔500ms 听上去普通
noTone(beeppin);
}
void buzzer3() //这里我用了除余的方法,目的是如果处在安全距离,在不用delay的情况下蜂鸣器响声不要那么频繁
{
if(i%100 == 1){
tone(beeppin,500);
}
else{
noTone(beeppin);
}
i++;
}
void setColor(int red, int green, int blue) //三色LED的设置颜色函数,如果是用三个led则这里删去。然后把上面也改一下
{
analogWrite(ledpin3, red);
analogWrite(ledpin2, green);
analogWrite(ledpin1, blue);
}
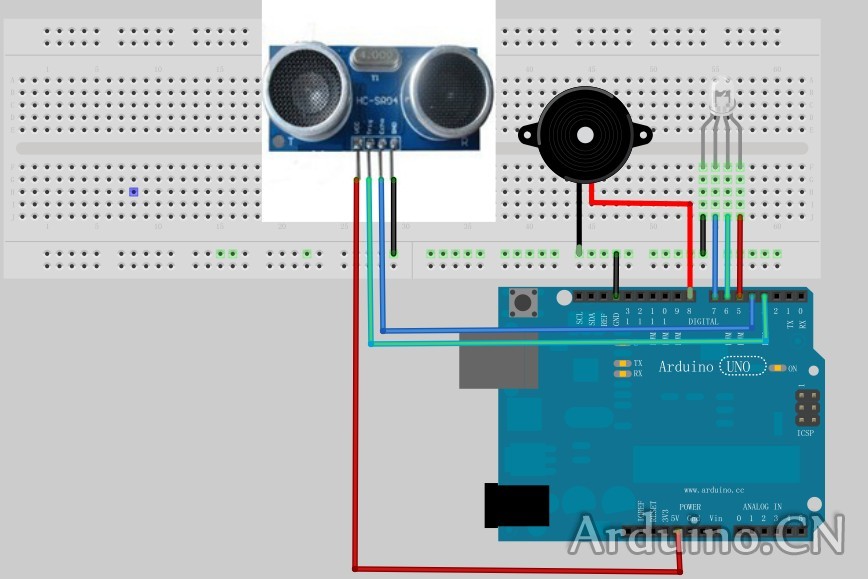
连线图
串口监视器
Hits: 200