同步时序和异步时序
同步时序
存储电路中所有触发器的时钟输入端都接同一个时钟脉冲源,因而所有触发器的状态的变化都与所加的时钟脉冲信号同步。存储电路中所有触发器的时钟使用统一的clk,状态变化发生在同一时刻。
同步时序就可以极大地降低单片机对硬件电路的依敕。
同步时序的好处就是,对时间要求不严格,对硬件电路不怎么依赖,在一些低端单片机没有硬件资源的情况下,也很容易使用软件的模拟时序,缺点就是多一根时钟线
同步逻辑电路的特点:
电路所有的触发器的输入输出都只与系统的时钟脉冲有关系
电路可以有多个时钟信号,但都与系统时钟有着因果关系
同步电路的状态会持续,直到下一个时钟脉冲信号到来才会改变状态
异步时序
电路没有统一的时钟,有些触发器的时钟输入端与时钟脉冲源相连,这有这些触发器的状态变化与时钟脉冲同步,而其他的触发器的状态变化不与时钟脉冲同步。没有统一的clk,触发器状态的变化有先有后。
异步时序的好处就是节省资源,缺点就是对时间要求严格,对硬件电路的依赖比较严重
异步逻辑电路的特点:
电路中没有统一的共同时钟
寄存器既有时钟脉冲驱动,也有不带时钟驱动;
I2C通信
I2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线
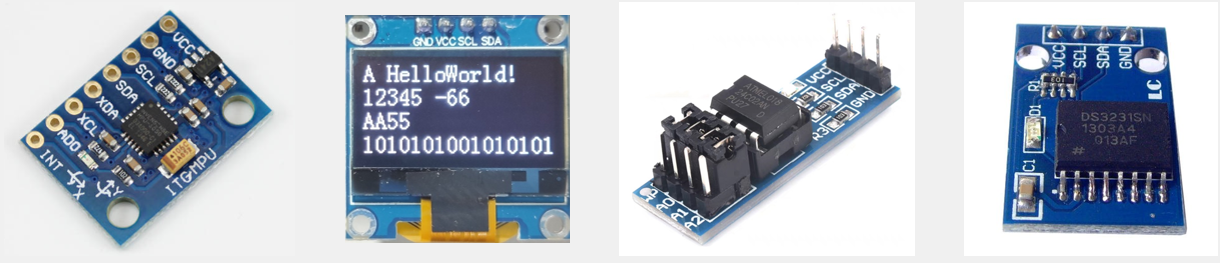
可以用来连接存储器(EEPROM、FLASH)、A/D、D/A转换器、LCD驱动器、传感器等等。
比如下图中的MPU6050模块、OLED模块、AT24C02存储器模块、DS3231实时时钟模块
两根通信线:SCL(Serial Clock)、SDA(Serial Data)I2C一共有只有两个总线: 一条是双向的串行数据线SDA,一条是串行时钟线SCL。
SDA(Serial data)是数据线,D代表Data也就是数据,Send Data 也就是用来传输数据的
SCL(Serial clock line)是时钟线,C代表Clock 也就是时钟 也就是控制数据发送的时序的
所有接到I2C总线设备上的串行数据SDA都接到总线的SDA上,各设备的时钟线SCL接到总线的SCL上。I2C总线上的每个设备都自己一个唯一的地址,来确保不同设备之间访问的准确性。
同步,半双工
带数据应答
支持总线挂载多设备(一主多从、多主多从)
硬件电路
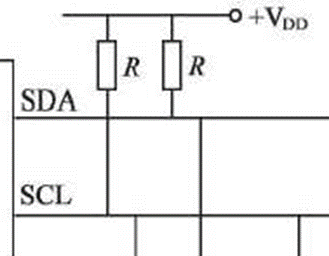
所有I2C设备的SCL连在一起,SDA连在一起
设备的SCL和SDA均要配置成开漏输出模式
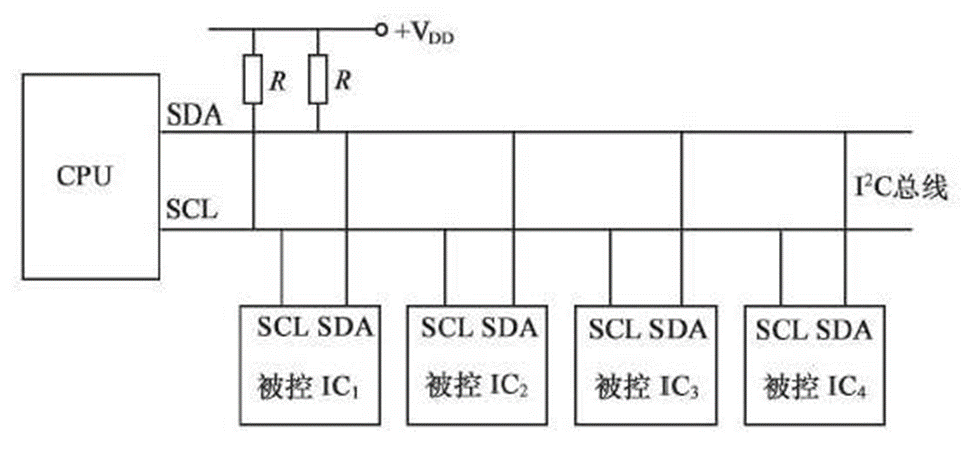
上图是,I2C的一个典型电路模型,这是一个一主多从的模型,左边cpu就是单片机,作为总线的主机,主机的权力很大,任何时候都是主机完全掌控SCL线,另外在空闲状态,下主机可以主动发起对SDA的控制,只有在从机发送数据和从机应答的时候,主机才会转交SDA的控制权给从机,这是主机的权利。
主机拥有SCL的绝对控制权,所以主机的SCL可以配置成推挽输出,从机的SCL都配置成浮空输入或者上拉输入。数据流向是,主机发送,所有从机接收。
主机的SDA在发送的时候是输出,接收的时候是输入。从机的SDA也会在输入和输出之间反复切换,如果总线时序没协调好,极有可能发生两个引脚同时处于输出的状态,如果这时又正好是一个输出高电平,一个输出低电平,那这个状态就是电源短路,这个状态是要极力避免的。
所以为了避免总线没协调好导致电源短路这个问题。I2C的设计是,禁止所有设备输出强上拉的高电平,采用外置弱上拉电阻加开漏输出的电路结构(图中右上角)
SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
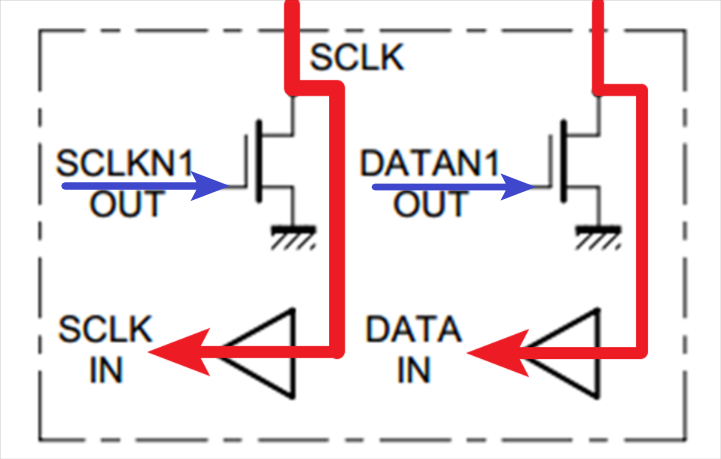
所有的设备,包括CPU和被控IC,它引脚的内部结构都是上图这样的,左边这一块是scl的结构,这里SCLK就是SCL的意思,右边这一块是SDA的结构,这里DATA IN就是SDA的意思
首先引脚的信号进来,都可以通过一个数据缓冲器或者施密特触发器,进行输入,因为输入对电路没有任何影响,所以任何设备在任何时刻都是可以输入的。
但是在输出的这部分,采用的是开漏输出的配置
正常的推挽输出是下图所示。
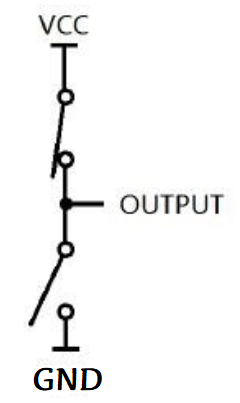
上面导通,输出高电平。
下面导通,输出低电平。
因为这是通过开关管直接接到正极和负极的,所以这个是,强上拉和强下拉的模式。
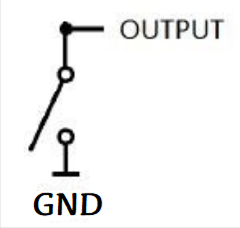
而开漏输出呢,就是去掉这个强上拉的开关管
输出低电平时,下管导通,是强下拉
输出高电平时,下管断开,但是没有上管了,此时引脚处于浮空的状态,这就是开漏输出。
和图示里SCLKN1 OUT是一样的。
输出低电平,开关管导通,引脚直接接地,是强下拉。
输出高电平,开关管断开,引脚什么都不接,处于浮空状态,这样的话所有的设备都只能输出低电平,而不能输出高电平。
为了避免高电平造成的引脚浮空,这时就需要在总线外面,SCL和SDA各外置一个上拉电阻,这是通过一个电阻拉到高电平的,所以这是一个弱上拉。
为了防止多个外设存在SCL同时输出高电平和低电平状态,造成冲突。
规定,所有的外设,不准向SCL输出高电平,此时SCL是弱上拉,不影响数据传输。
第一完全杜绝了电源短路现象,保证电路的安全,所有设备无论怎么样,都不会处于一个被同时强拉和强推的状态。
第二避免了引脚模式的频繁切换,开漏加弱上拉的模式,同时兼具了输入和输出的功能,因为开漏模式下,输出高电平就相当于断开硬件,所以在输入之前可以直接输出高电平,不需要再切换成输入模式
第三这个模式会有个“线与”的现象,只要有任意一个或多个设备输出了低电平,总线就处于低电平 ,只有所有的设备都输出高电平,总线才处于高电平。,I2C可以利用这个电路特征,执行多主机模式下的时钟同步和总线仲裁,所以这里SCL虽然在一主多重模式下可以用推挽输出,但是它仍然采用了开漏加上拉输出的模式,因为在多主机模式下会利用到这个特征
I2C时序基本单元
起始条件
起始条件:SCL高电平期间,SDA从高电平切换到低电平
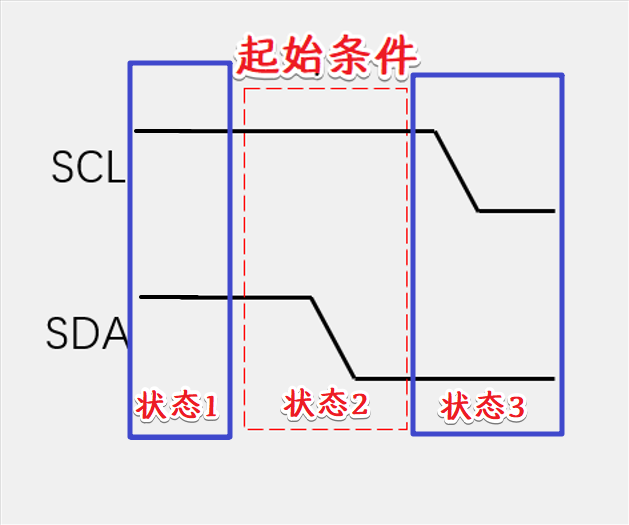
空闲状态时,SCL和SDA都处于高电平状态,总线处于平静的高电平状态(状态1),当主机需要进行数据收发时,首先就要打破总线的宁静,产生一个起始条件,当从机捕获到这个SCL高电平,SDA下降沿信号时,就会进行自身的复位,等待主机的召唤(状态2)。
然后在SDA下降沿之后,主机要再把SCL拉低电平(状态3),在拉低SCL电平,一方面是占用这个总线,另一方面也是为了方便我们这些基本单元的拼接,就是我们之后会保证除了起始和终止条件,每个时序单元的SCL都是以低电平开始,低电平结束。
终止条件
终止条件:SCL高电平期间,SDA从低电平切换到高电平
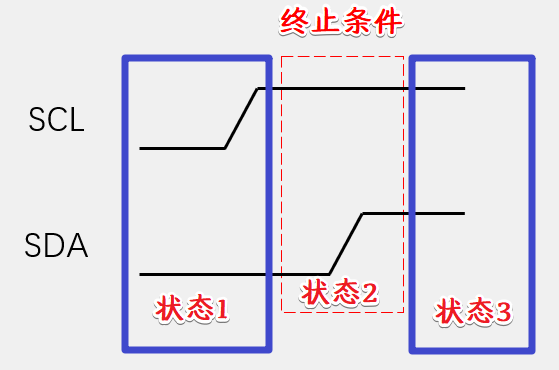
SCL先放手回弹到高电平(状态1),SDA再放手回弹高电平,产生一个上升沿(状态2)。这个上升沿触发终止条件,同时终止条件之后,SCL和SDA都是高电平,回归到最初的平静状态(状态3)。
这个起始条件和终止条件,就类似串口时序里的起始位和停止,一个完整的数据帧总是以起始条件开始,终止条件结束,另外,起始和终止都是由主机产生的,从机不允许产生起始和终止,所以在总线空闲状态时,从机必须始终双手放开,不允许主动跳出来去碰这总线,如果允许的话,那就是多主机模型了,不在本节的讨论范围之内,这就是起始条件和终止条件。
在起始条件之后,这时就可以紧跟着一个发送一个字节的时序单元,如何发送一个字节呢?
发送一个字节
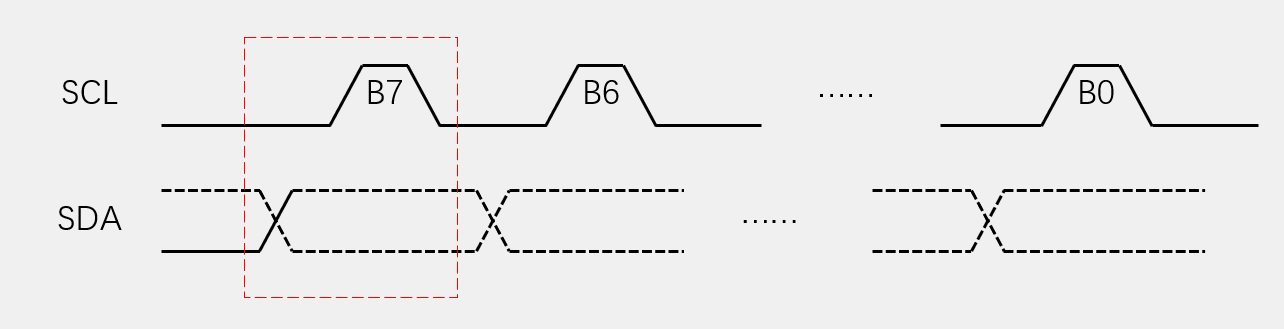
SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
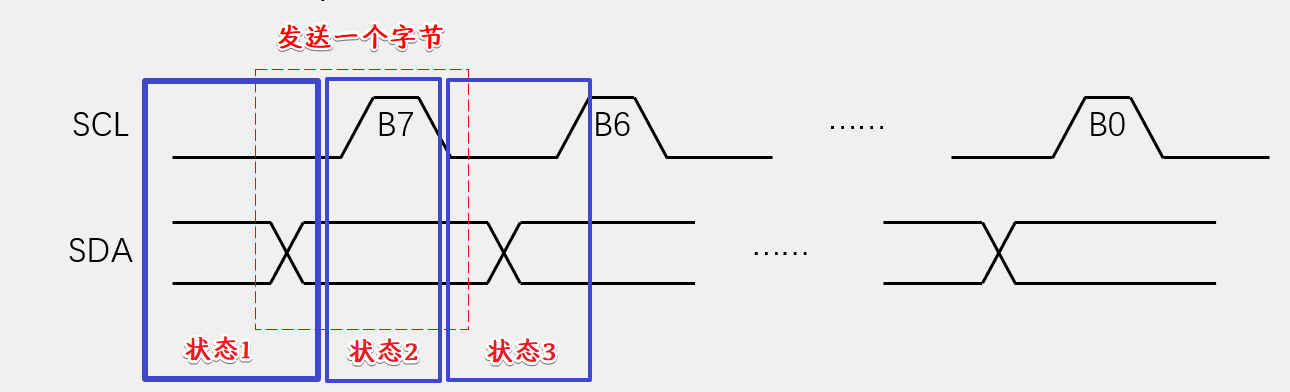
起始条件之后,第一个字节也必须是主机发送的,主机如何发送呢,就是最开始,SCL低电平,主机如果想发送0,就拉低SDA到低电平,如果想发送1就放手SDA回弹到高电平。在SCL低电平期间,允许改变SDA的电平(状态1)。
当这1位放好之后,主机就松手,时钟线SCL回弹到高电平。在高电平期间是从机读取SDA的时候,所以高电平期间SDA不允许变化。SCL处于高电平之后,从机需要尽快的读取SDA,一般都是在上升沿这个时刻,从机就已经读取完成了,因为始终是主机控制的从机,并不知道什么时候就会产生下降沿了,从机在上升沿时就会立刻把数据读走(状态2)。
那主机在放手SCL一段时间后,就可以继续拉低SCL,传输下一位。主机也需要在SCL下降沿之后,尽快把数据放在SDA上,但是主机有时钟的主导权,所以主机并不需要那么着急,只需要在低电平的任意时刻,把数据放在SDA上就行了,晚点也没关系,数据放完之后,主机再放手SCL,SCL高电平从机读取这一位(状态3),就这样的流程。
主机拉低SCL把数据放在SDA上;主机松开SCL,从机读取SDA的数据。在SCL的同步下,依次进行主机发送和从机接收,循环八次就发送了八位数据,也就是一个字节。
高位先行,所以第一位是一个字节的最高位b7,然后依次是次高位b6 等等,最后发送最低位b0 ,这个和串口是不一样的,串口时序是低位先行,这里I2C是高位先行。
另外由于这里有时钟线进行同步,所以如果主机一个字节发送一半,突然进中断了,不操作SCL和SDA了,那时序就会在中断的位置不断拉长,SCL和SDA电平都暂停变化,传输也完全暂停,等中断结束后,主机回来继续操作,传输仍然不会出问题,这就是同步时序的好处
就是说老师在上课的时候突然拉稀了,老师可以不管学生直接中断去厕所,上完厕所再回来接着上课。
最后就是,由于这整个时序是主机发送一个字节,所以在这个单元里,SCL和SDA全程都有主机掌控,从机只能被动读取。
接收一个字节
SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
释放SDA其实就相当于切换成输入模式,或者这样来理解所有设备处于输入模式,当主机需要发送的时候,就可以主动去拉低SDA,而主机在被动接收的时候,就必须先释放SDA,不要去动它,以免影响别人发送来的数据。因为总线是线与的特征,任何一个设备拉低了总线就是低电平,如果接收的时候还拽着SDA不放手,那别人无论发什么数据,总线都始终是低电平,所以主机在接收之前需要释放SDA
从流程上来看,接收一个字节和发送一个字节,是非常相似的。
区别就是:
发送一个字节是低电平主机放数据,高电平从机读数据
接收一个字节是低电平从机放数据,高电平主机读数据
时序和发送的基本一样,区别就是SDA线。
主机在接收之前需要释放SDA,然后这时从机就取得了SDA的控制权,从机需要发送零就把SDA拉低,从机需要发送1就放手,SDA回弹高电平。
然后同样的低电平变换数据,高电平读取数据。(这里实线部分表示主机控制的电平啊,虚线部分表示从机控制的电平。)SCL全程由主机控制,SDA主机在接收前要释放,交由主机控制。
之后还是一样,因为SCL始终是由主机控制的,所以从机的数据变换基本上都是贴着SCL,下降也进行的,而主机可以在SCL高电平的任意时刻读取,这是接收一个字节的时序。
发送应答
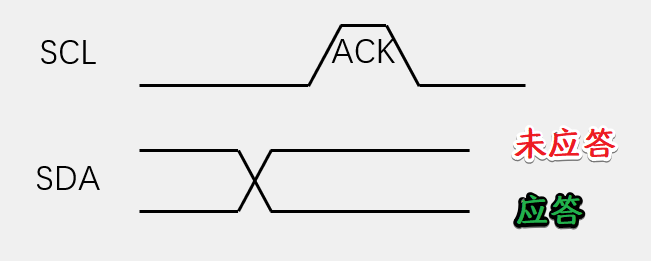
主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
在接收一个字节之后,我们也要给从机发送一个应答位,发送应答位的目的是告诉从机,你是不是还要继续发,如果从机发送一个数据后,得到了主机的应答,那从机就还会继续发送,如果从机没得到主机的应答,那从机就会认为那我发生了一个数据,但是主机不理我,可能主机不想要了吧。这时从机就会释放SDA,交出SDA的控制权,防止干扰主机之后的操作,这就是应答位的执行逻辑。
接收应答
主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
当调用发送一个字节之后,就要紧跟着调用接收应答的时序,用来判断从机有没有收到刚才给打的数据,如果从机收到了,那在应答位这里,主机释放SDA的时候,从机就应该立刻把SDA拉下来,然后在SCL高电平期间,主机读取应答位,如果应答位为零,就说明从机确实收到了。
I2C数据帧
I2C是一主多从的模型,通过设备地址确定设备,主机可以访问总线上的任何一个设备,把每个从设备都确定一个唯一的设备地址,主机在起始条件之后,要先发送一个字节叫一下从机地址, 所有从机都会收到第一个字节,和自己的地址进行比较。如果一样,就说明,主机现在在请求和这个从机通信,就响应之后主机的读写操作。
从机设备地址,在12C协议标准里分为7位地址和10位地址。每个I2C设备出厂时,都会确定一个7位I2C地址,这个地址具体是什么,可以在芯片手册里找到,比如后面使用MPU6050这个芯片的7位地址是1101 000,AT24C02的7位地址1010 000。
相同的芯片挂载在同一条总线,需要用到地址中的可变部分,一般器件地址的最后几位是可以在电路中改变的,即使相同型号的芯片,挂载在同一个总线上,也可以通过切换地址低位的方式,保证每个设备的地址都不一样。
指定地址写
对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
对于指定设备通从机地址(Slave Address )确定。对指定设备的内部寄存器地址(Reg Address)写入数据。
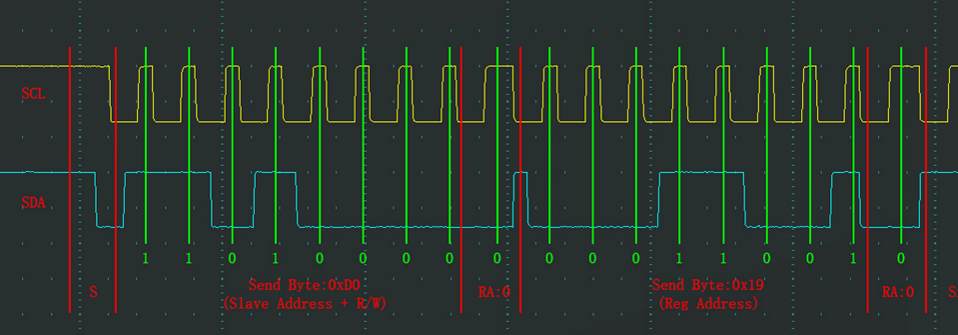
起始条件(Start,S)
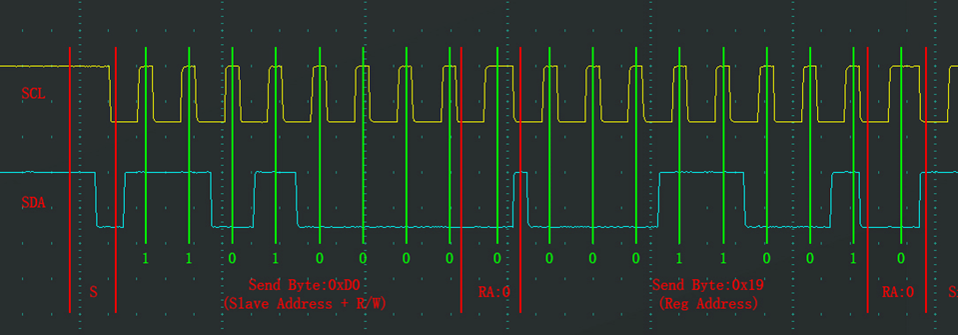
空闲状态,都是高电平,然后主机需要给从机写入数据的时候,首先SCL高电平期间,拉低SDA产生起始条件(Start,S)
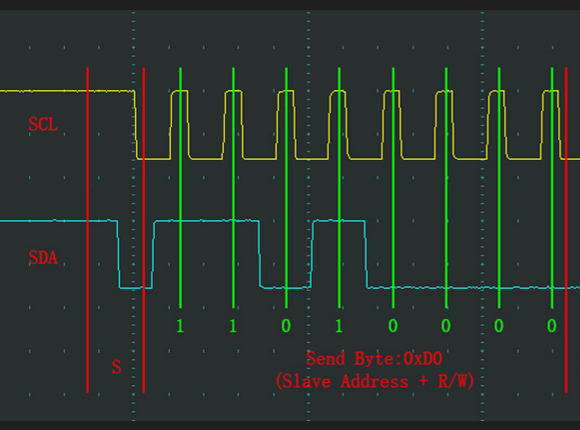
发送一个字节(Send Byte)
在起始条件之后,紧跟着的时序,必须是发送一个字节(8位)的时序,字节的内容必须是从机地址加读写位(Slave Address + R / W),正好从机地址是七位,读写位是一位,加起来是一个字节(8位)
发送从机地址,就是确定通信的对象。发送读写位,就是确认接下来是要写入还是要读出。
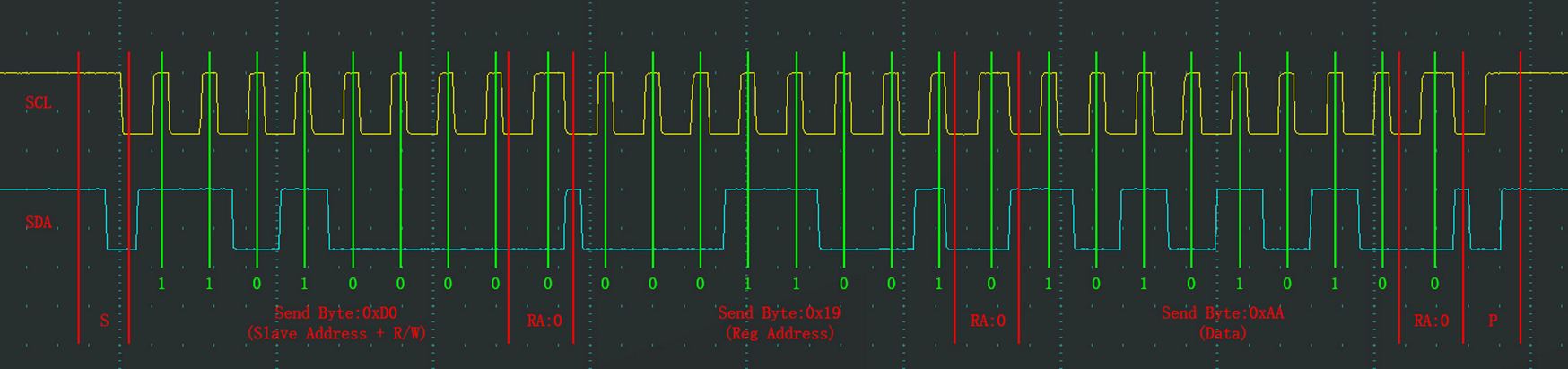
具体发送的时候,在这里低电平期间SDA变换数据,高电平期间从机读取SDA,(这里使用绿色的线来标明了从机读到的数据),比如图中的波形,那从机收到的
第一位就是高电平1,然后SCL低电平,主机继续变换数据
第二位还是1,所以这里SDA电平并没有变化,然后SCL高电平,从机读到第二位是1。
之后继续按低电平变换数据,高电平读取数据
第三位就是0。
这样持续八次就发送了一个字节数据,其中这个数据的定义是,高七位表示从机地址。
这个波形下,主机寻找的从机地址就是1101000,这个就是MPU6050的地址,最低位表示读写位0,表示之后的时序,主机要进行写入操作。(1表示之后的时序主机要进行读出操作,0表示之后要进行写入操作)
目前主机是发送了一个字节,高位先行就是0xD0(1101 0000)
应答位

根据协议规定,紧跟着的单元就得是接收从机的应答位(RA:0),在这个时刻,主机要释放SDA,
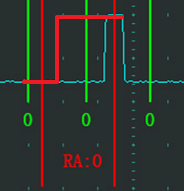
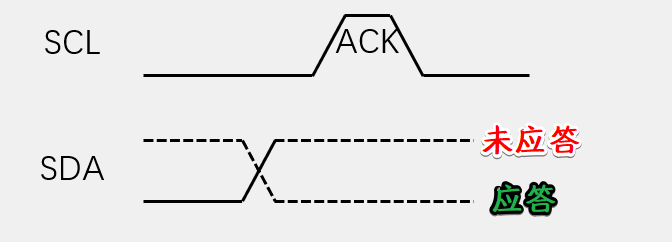
如果单看主机的波,应该是这样,释放SDA之后引脚电平回弹到高电平。但是根据协议规定,从机要在这个位拉低SDA。
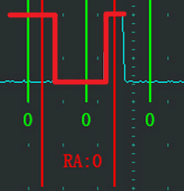
单看从机的波形,应该是如上图 。应该应答的时候,从机立刻拽住SDA,然后应答结束之后,从机再放开SDA。
现在综合两者的波形,结合线与的特性,在主机释放SDA之后,由于SDA也被从机拽住了,所以主机松手后,SDA并没有回弹,高电平这个过程就代表从机产生的应答,最终高电平期间主机读取SDA发现是0,就说明我进行寻址,有应答传输没问题。
如果主机读取SDA发现是1,就说明主机进行寻址,应答位期间,主机松手了,但是没回弹高电平,没有应答,那就直接产生停止条件吧,并提示一些信息
继续紧接着上升沿,就是应答位结束后,从机释放SDA产生的,从机交出了SDA的控制权,因为从机要在低电平尽快变换数据,所以这个上升沿和SCL的下降沿,几乎是同时发生的。
第二个字节
由于之前读写位给了0,所以应答结束后,要继续发送一个字节,同样的时序再来一遍,第二个字节就可以送到指定设备的内部来,从机设备可以自己定义,第二个字节和后续字节的用途,一般第二个字节可以是寄存器地址,或者是指令控制字等,比如mpu6050定义的第二个字节就是寄存器地址。比如AD转换器,第二个字节可能就是指令控制字。比如存储器,第二个字节可能就是存储器地址。
那图示,主机发送这样一个波,一一判定数据为0001 1001,即主机向从机发送的0x19 ,这个数据在MPU6050里,就表示,要操作你0x19地址下的寄存器,这同样是从机应答,主机释放SDA从机拉低SDA,SDA表现为低电平,主机收到应答位为0,表示收到了从机的应答,然后继续同样的流程,再来一遍,主机再发送一个字节,这个字节就是主机想要写入到,0x19地址下寄存器的内容了,比如这里发送了0xAA的波形,就表示我在0x19地址下写入0xAA,最后是接收应答位,如果主机不需要继续传输了,就可以产生停止条件(Stop,P)。
停止条件(P)
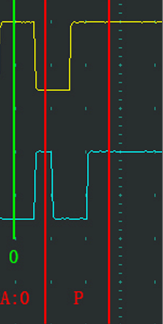
在停止条件之前先拉低SDA,为后续SDA的上升沿做准备。然后释放SCL,再释放SDA。这样就产生了,SCL高电平期间,SDA的上升沿,这样一个完整的数据帧就拼接完成了。
这个数据帧的目的,就是对于指定从机地址为1101 000的设备,在其内部0x19地址下的寄存器中,写入0xAA这个数据,这是指定地址写的时序
当前地址读
完成的任务是对于指定设备(Slave Address),在当前地址指针指示的地址下,读取从机数据(Data)
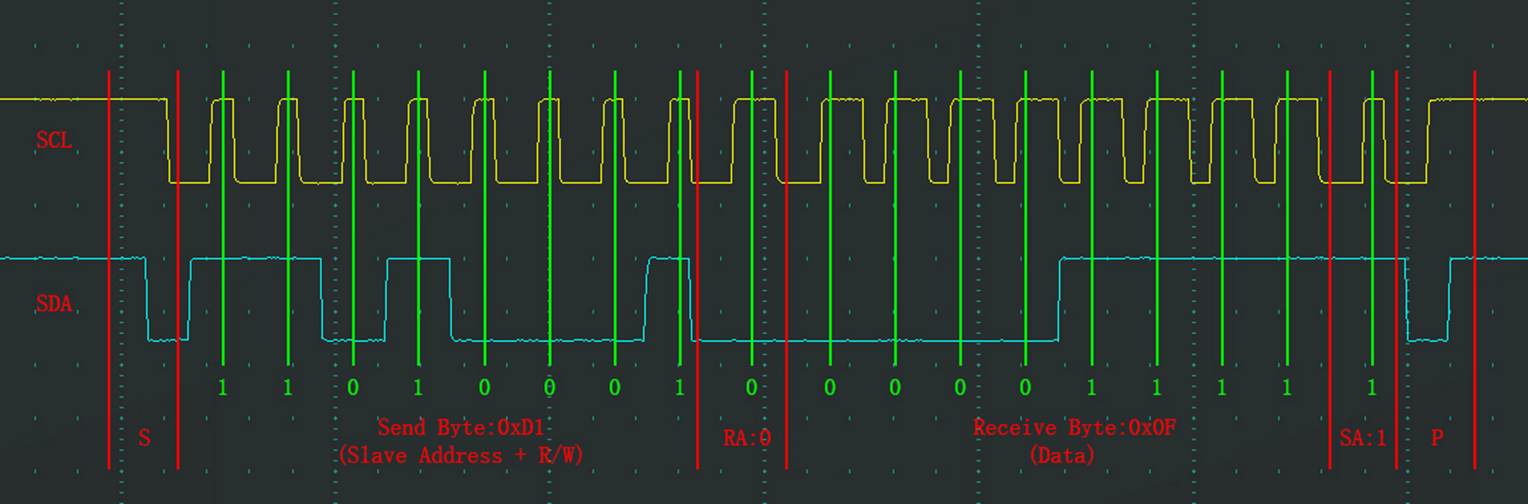
这就是当前地址读的时序,如果主机想要读取从机的数据,就可以执行这个时序
起始条件(S)
那最开始还是SCL高电平期间,拉低SDA产生起始条件,起始条件开始后。 ,主机必须首先调用发送一个字节,来进行从机的寻址和指定读写标志位。
比如图示的波形表示,本次寻址的目标是100 1000的设备,同时最后一位读写标志为1,表示主机接下来想要读取数据,紧跟着,发送一个字节之后,接收一下从机应答位,从机应答0,代表从机收到了第一个字节,在从机应答之后。
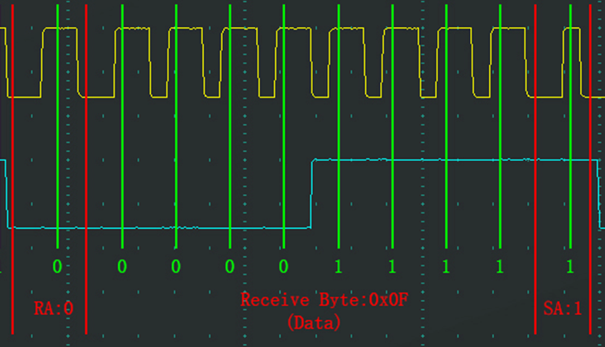
从这里开始数据的传输方向就要反过来了,因为刚才主机发出了读的命令,所以这之后主机就不能继续发送了,要把SDA的控制权交给从机,主机调用接收一个字节的时序进行接收操作,在这一块从机就得到了主机的允许,可以在SCL低电平之间写入SDA,然后主机在SCL高电平期间读取SDA,那最终主机在SCL高电平期间,一次读取八位,就接收到了从机发送的一个字节数据,00001111,也就是0x0f,
那现在问题就来了,这个0x0f是从机哪个寄存器的数据呢?
当前地址指针
在读的时序中,I2C协议的规定是,主机进行寻址时,一旦读写标志位给1,下一个字节就要立马转为读的时序,所以主机还来不及指定想要读哪个寄存器,就得开始接收了。所以这里就没有指定地址这个环节,那主机并没有指定寄存器的地址,从机到底该发哪个寄存器的数据,
这需要用到上面说的当前地址指针,在从机中,所有的寄存器被分配到了一个线性区域中,并且会有个单独的指针变量,指示着其中一个寄存器,这个指针上电默认,一般指向0地址。并且每写入一个字节和读出一个字节后,这个指针就会自动自增一次,移动到下一个位置,主机没有指定要读哪个地址,从机就会返回当前指针指向的寄存器的值。
那假设刚刚调用了这个指定地址写的时序,在0x19的位置写出了0xAA,那么指针就会+1,移动到0x1A的位置,返回的就是0x1A地址下的值。再调用这个当前地址读的时序,返回的就是0x1B地址下的值,以此类推,这就是当前地址读时序的操作逻辑。由于当前地址读并不能指定读的地址,所以这个时序用的不是很多。
指定地址读
这个时序的目的就是对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)

在指定地址写中,在这前面一部分就是指定地址的时序,把最后面的写数据的这一部分给去掉,然后把前面这一段设置地址,还没有指定写什么数据的时序,追加到这个当前地址读时序的前面,就得到了指定地址读的时序。一般也把它称作复合格式
将上面的时序分隔一下,分成两个部分
前面的部分是指定地址写,但是只指定了地址,还没来得及写。
后面的部分是当前地址读,因为刚指定的地址,两者加在一起就是指定地址读了。
所以指定地址读的时序会复杂一些,详细分析一下看看
第一部分寻找从机地址和从机寄存器地址
首先最开始仍然是启始条件,然后发送一个字节进行寻址,这里指定从机地址是100 1000,读写标志位是0,代表要进行写的操作,经过从机应答之后,再发送一个字节,第二个字节用来指定寄存器地址,这个数据就写入到了从机的地址指针里了,也就是说从机接收到这个数据之后,它的寄存器指针就指向了0x19。
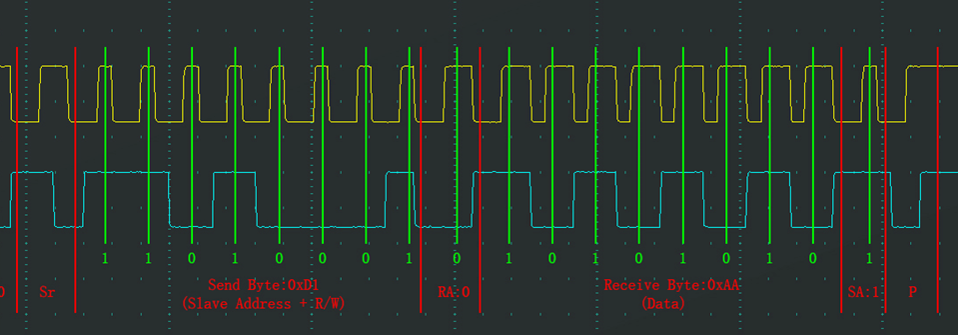
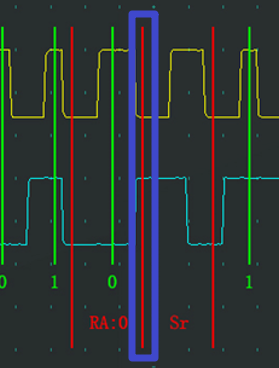
第二部分切换读写方向,读取上一部分确认的寄存器
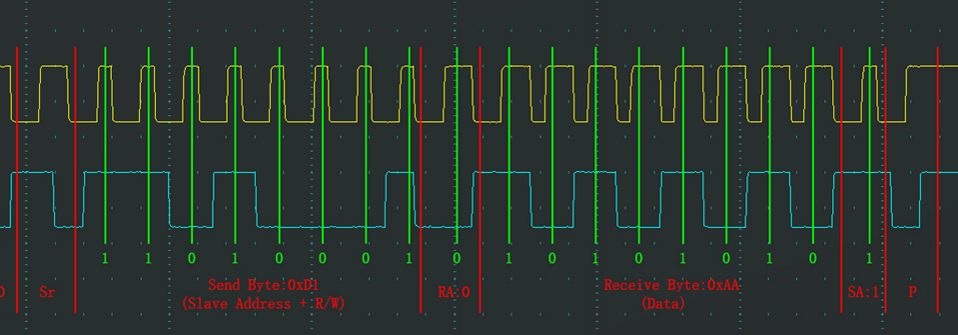
这个位置之后,我们要写入的数据,不给他发,而是直接再来个起始条件,这个Sr(Start Repeat)的意思就是重复起始条件,相当于另起一个时序。
因为指定读写标志位,只能是跟着起始条件的第一个字节,所以如果想切换读写方向,只能再来个起始条件。
然后起始条件后,重新寻址(100 1000),并且指定读写标志位1,代表要开始读了,接着主机接收一个字节。这个字节就是0x19 地址下的数据,这就是指定地址读。
也可以在蓝框再+1个停止条件,这样的话就是两个完整的时序了。
先起始(S),写入地址(Send),停止(P)。
因为写入的地址会存在地址指针里面,所以这个地址并不会因为时序的停止而消失。
再起始(Sr),读当前位置(Receive),停止(P)。
这样两条时序也可以完成任务,但是I2C协议官方规定的复合格式是一整个数据帧。即:先起始(S)再重复起始(Sr),再停止(P)。相当于把两条时序拼接成一条。
这些就是3个I2C完整时序的介绍。,其中第一个指定地址写和第三个指定地址读用的比较多,除了这三个时区,I2C还有这些时序的进阶版本,大概介绍一下。
应答位(ACK)的作用
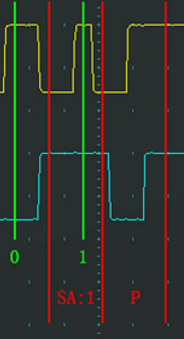
如果只想读一个字节就停止的话,在读完一个字节之后,一定要给从机发个非应答,(Send Ack,SA)。
非应答就是该主机应答的时候,主机不把SDA拉低,从机读到SDA为1,就代表主机没有应答,从机收到非应答之后,就知道主机不想要继续了,从机就会释放总线,把SDA的控制权交还给主机。
如果主机读完仍然给从机应答了,就会认为主机还想要数据,就会继续发送下一个数据,而这时,主机如果想产生停止条件,SDA可能就会因为被从机拽住了,而不能正常弹回高电平,这个注意一下
如果主机想连续读取多个字节,就需要在最后一个字节给非应答,而之前的所有字节都要给应答。
简单来说就是主机给应答了,从机就会继续发。主机给非应答了,从机就不会再发了,并交出SDA的控制权。
从机控制SDA发送一个字节的权利,开始于读写标志位为1,结束于主机给应答位为1,这是主机给从机发送应答位的作用
I2C时序的进阶版本
这些时序,指定地址写只是写一个字节,当前地址读和指定地址读,也都是读一个字节,那进阶版本就是指定地址写多个字节,当前地址读多个字节,指定地址读多个字节。
实际上和单个字节读写都非常相似,只需要增加一些小细节就行。
指定地址写多个字节
指定地址,然后写入一个字节,如果只想写一个字节,那就停止就行,如果想写多个字节,就可以把这最后一部分(Send Byte)多重复几次,比如重复三遍,发送一个字节和接受应答。这样第一个数据就写入到了指定地址0x19 的位置,然后不要忘了,写入一个数据后,地址指针会自动+1,变成0x1A,所以这第二个数据就写入到了,0x1A的位置。同理,第三个数据就写入的是0x1b的地址,以此类推,这样这个时序就进阶为在指定的位置开始,按顺序连续写入多个字节。
比如你需要连续写入多个寄存器,就可以考虑这样来操作,这样在一条数据帧里,就可以同时写入多个字节,执行效率就会比较高。
同理当前位置读和指定位置读,也可以多次执行这最后一部分时序,由于地址指针在读后也会自增,所以这样就可以连续读出一片区域的寄存器,效率也会非常高。
总结
以上就是I2C总线的硬件规定和软件规定,有了这些规定,就可以按照硬件规定来连接线路,用软件规定来操作总线,以此实现指定位置写寄存器和指定位置读寄存器,有了这两个功能,主机就可以完全掌控外挂模块的运行,也就实现了这个协议的目的。
Hits: 110